أبرز النقاط
- OOMWOO مشروع مكنسة روبوتية مفتوحة المصدر بالكامل: العتاد والبرمجيات والبرامج الثابتة
- تعمل محلياً دون أي اعتماد على السحابة مع تكامل مباشر مع Home Assistant
- يمكن لأي شخص المساهمة في التطوير الآن عبر المحاكاة دون انتظار العتاد
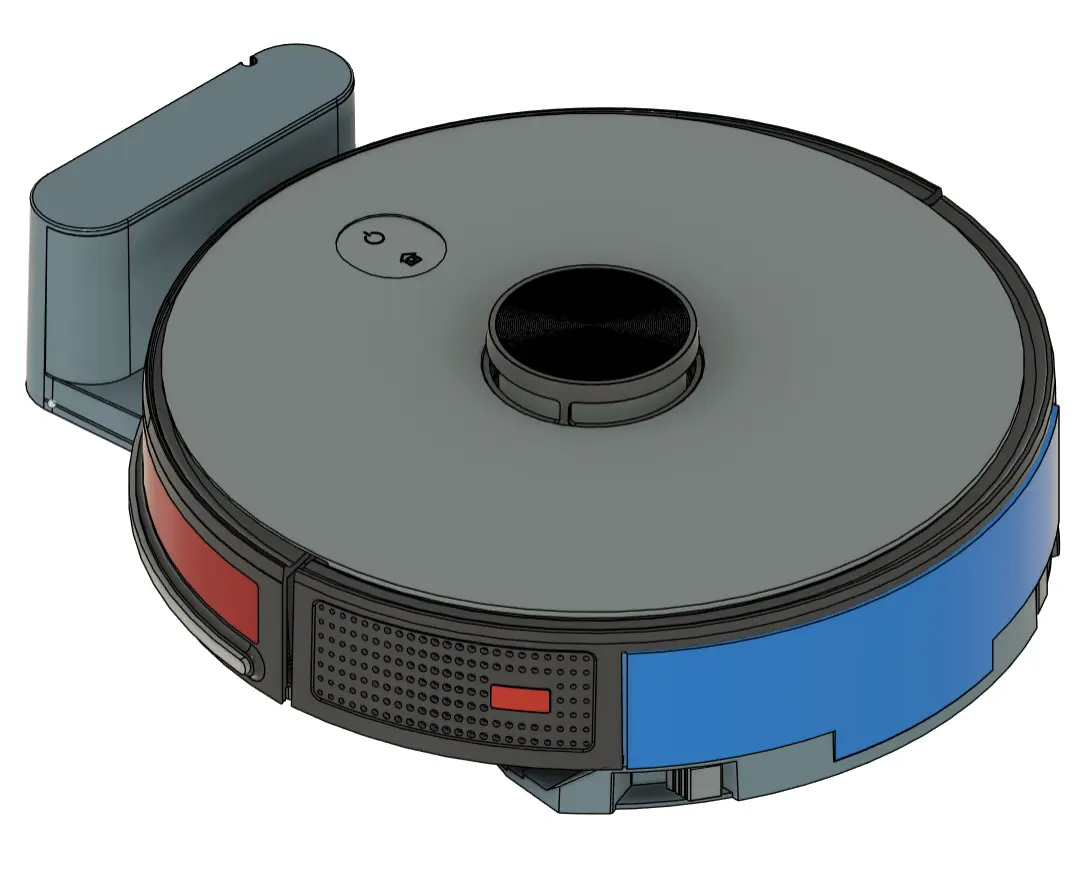
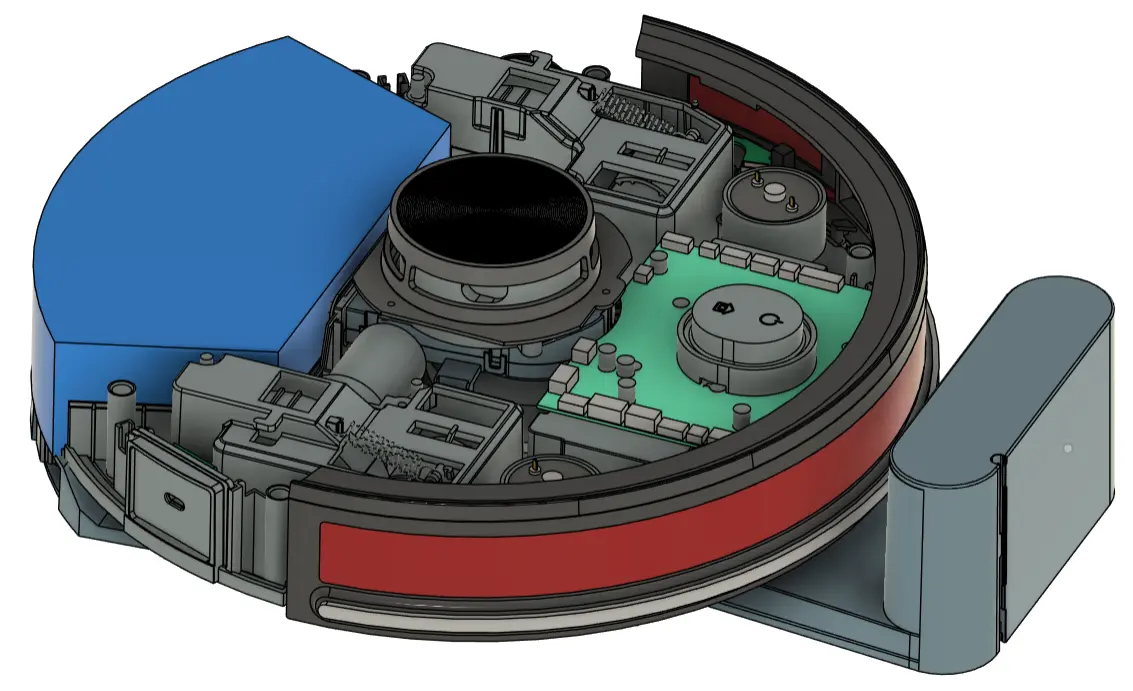
أطلق مشروع Maker's Pet مبادرة طموحة تحمل اسم OOMWOO، وهي مكنسة روبوتية مفتوحة المصدر بالكامل يمكن لأي شخص بناؤها بنفسه من الصفر. المشروع يشمل العتاد المفتوح والبرمجيات المفتوحة والبرامج الثابتة المفتوحة، ويُبنى بشكل علني منذ أول التزام برمجي على GitHub. الفكرة الجوهرية واضحة: مكنسة ذكية تعمل محلياً بالكامل، لا تحتاج سحابة، ولا تُقيّدك بمورّد واحد.
ما الذي يميز OOMWOO عن المكانس الروبوتية التجارية؟
المكانس الروبوتية من شركات مثل iRobot وRoborock وEcovacs تعتمد بشكل متزايد على الاتصال السحابي والبرمجيات المغلقة، ما يثير مخاوف متعلقة بالخصوصية حول بيانات خرائط المنازل. OOMWOO تقلب هذه المعادلة: كل شيء يعمل محلياً، وكل مكوّن قابل للفهم والتعديل.
- عتاد وبرمجيات وبرامج ثابتة مفتوحة المصدر بالكامل
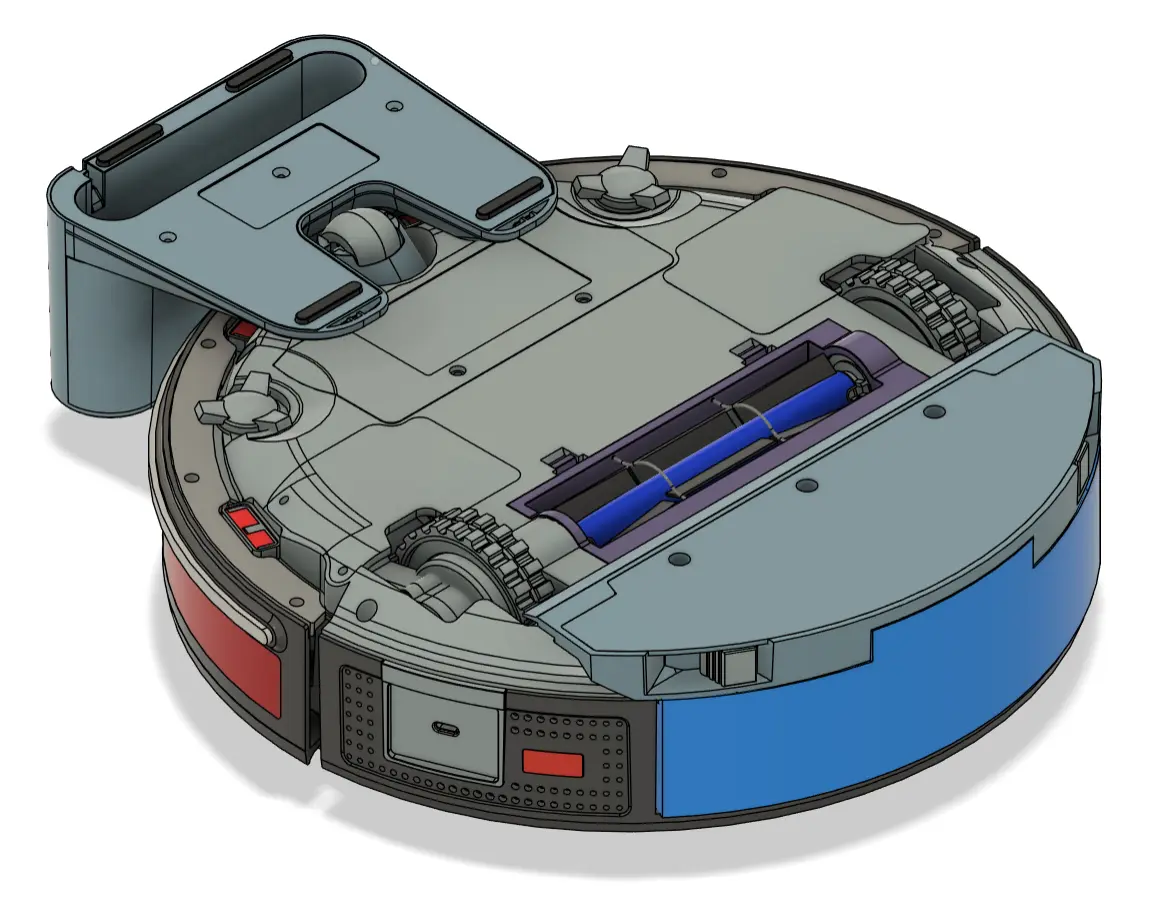
- رسم خرائط وملاحة ذاتية عبر LiDAR ثنائي الأبعاد بتكلفة معقولة
- تكامل أصلي مع Home Assistant للتحكم المحلي
- هيكل قابل للطباعة ثلاثية الأبعاد مع توثيق كامل
- لا حاجة للسحابة في التشغيل اليومي إطلاقاً
- جودة أجهزة منزلية حقيقية وليست مجرد نموذج تجريبي
اسم OOMWOO ليس عشوائياً: إنه أمبيغرام دوراني يُقرأ بنفس الطريقة عند قلبه 180 درجة، تماماً كالروبوت الذي يتحرك في كل الاتجاهات على أرضيتك.
ما التقنيات المستخدمة في المشروع؟
يعتمد OOMWOO على ROS 2 (نظام تشغيل الروبوتات الإصدار الثاني)، وهو البرمجية الوسيطة مفتوحة المصدر المعيارية في صناعة الروبوتات التي تُستخدم في البحث العلمي والتطبيقات التجارية على حد سواء. هذا يجعل المشروع متقدماً تقنياً لكنه يظل في متناول الهواة.
- Raspberry Pi 5 أو ESP32 مع micro-ROS (القرار النهائي للمعمارية قيد الدراسة)
- محاكاة ROS 2 Gazebo للاختبار قبل البناء الفعلي
- LiDAR مع SLAM يدوي لرسم الخرائط
- لوحة PCB للتحكم بالمحركات ومدخلات المستشعرات (ستُعلن قريباً)
أين وصل المشروع حالياً؟
المشروع في مراحله المبكرة جداً من ناحية العتاد، وهذا مقصود في فلسفة البناء العلني. حالياً يجري توفير القطع الأساسية. لكن من ناحية البرمجيات، بيئة التطوير جاهزة تماماً: يمكنك تثبيتها وتشغيل OOMWOO في المحاكاة خلال 15 دقيقة تقريباً دون أي عتاد.
النقطة المثيرة: يمكنك المساهمة في تطوير برمجيات الروبوت واختبارها في منزلك باستخدام مكنسة روبوتية تجارية أخرى كبديل مؤقت، دون انتظار اكتمال تطوير العتاد.
كيف يمكنك المشاركة في بناء OOMWOO؟
نُظّم المشروع ليتمكن المجتمع من البناء بالتوازي. الروبوت وبرمجياته مقسّمة إلى وحدات مستقلة تُسمى طلبات المساهمة (Requests for Contributions). تختار الوحدة التي تهمك، تعمل عليها في وقتك، وتُرسل عملك كطلب سحب (pull request). يمكن لعدة أشخاص العمل على نفس الوحدة، والحل الأفضل يظهر مع الوقت.
- إنشاء نماذج STEP ثلاثية الأبعاد للقطع المُشتراة: تجميعات عجلات القيادة، عجلات الدوران، المراوح، الفُرش الرئيسية
- برمجة وظيفة التنظيف مع رسم الخرائط أثناء SLAM والاستكشاف
- البحث في مواصفات القطع: كثير منها يفتقر لأوراق بيانات ويحتاج هندسة عكسية
ما الذي سيتضمنه الإصدار الأول v0؟
- هيكل مطبوع ثلاثياً
- محاكاة ROS 2 Gazebo
- LiDAR مع SLAM يدوي
- ROS 2 على Raspberry Pi 5 و/أو ESP32
المُخرجات مفتوحة المصدر ستشمل: قائمة المواد، ملفات الطباعة ثلاثية الأبعاد، بيئة تطوير البرمجيات (جاهزة الآن)، البرامج الثابتة، لوحة PCB، تعليمات البناء خطوة بخطوة، وثائق استكشاف الأخطاء، وفيديوهات توضيحية.
هل أحتاج لشراء طقم قطع أم أوفّرها بنفسي؟
كل شيء في OOMWOO يبقى مفتوحاً: يمكنك توفير كل قطعة بنفسك من مصادر مختلفة. لكن إن أردت تجاوز مرحلة البحث عن القطع، سيتوفر طقم ملائم يشمل المحركات ولوحة PCB والفُرش والحشيات وLiDAR من Maker's Pet. الطقم للراحة فقط، وليس شرطاً أبداً.
أين تتابع تطورات المشروع؟
- GitHub: github.com/makerspet/oomwoo — الكود والوثائق والنقاشات
- Discord: محادثات البناء مع تحديثات مرتين أسبوعياً
- YouTube: قناة البناء العلني
- X: حساب @0OMWO0 سيُفعّل منتصف يوليو
رأي Logicity
OOMWOO ليس مجرد مشروع هواة: إنه تحدٍّ مباشر لنموذج الأعمال السائد في صناعة المكانس الروبوتية القائم على الاشتراكات والسحابة. للمقارنة، مكانس LiDAR التجارية مثل Roborock S8 أو Ecovacs Deebot تبدأ من 400-600 دولار مع اعتماد سحابي، بينما OOMWOO قد تُبنى بتكلفة أقل مع ملكية كاملة. المشروع يستهدف شريحة محددة: من يملكون خبرة في Raspberry Pi والطباعة ثلاثية الأبعاد ومستعدون للاستثمار في وقت البناء مقابل التحكم الكامل. التكامل مع Home Assistant يجعله جذاباً لمن يبنون منازل ذكية محلية بالكامل.
الأسئلة الشائعة
هل يمكنني بناء OOMWOO دون خبرة في البرمجة؟
المشروع يستهدف مجتمع الصنّاع (Makers) ويتطلب إلماماً بـ Raspberry Pi وROS 2 والطباعة ثلاثية الأبعاد. التعليمات ستكون تفصيلية، لكنه ليس مشروعاً للمبتدئين تماماً.
كم ستكلف مكنسة OOMWOO تقريباً؟
لم تُعلن التكلفة النهائية بعد، لكن المشروع يُصمم ليكون ميسور التكلفة مقارنة بالمكانس التجارية التي تبدأ من 200-400 دولار لفئة LiDAR.
هل تعمل OOMWOO مع أنظمة المنزل الذكي؟
نعم، التكامل الأصلي مع Home Assistant مدمج في التصميم، مما يتيح التحكم المحلي الكامل دون الحاجة لأي خدمات سحابية.
متى سيتوفر العتاد للبناء؟
المشروع في مراحله المبكرة. الإصدار v0 سيشمل الهيكل المطبوع وتكامل LiDAR الأساسي. يمكنك متابعة تقدم توفير القطع على GitHub.
هل يمكنني المساهمة الآن دون امتلاك العتاد؟
نعم، بيئة التطوير البرمجية جاهزة ويمكنك تشغيل المحاكاة خلال 15 دقيقة. يمكنك أيضاً استخدام مكنسة روبوتية تجارية كبديل للاختبار الفعلي.
هل تحتاج مساعدة في التطبيق؟
إذا كنت مهتماً ببناء مشاريع روبوتية مفتوحة المصدر أو دمج أنظمة التحكم المحلية في منزلك الذكي، تواصل مع فريق Logicity للحصول على استشارة تقنية متخصصة.
فاطمة الزهراء
كاتبة تقنية متخصصة في الذكاء الاصطناعي
أُنتِج هذا المقال بمساعدة الذكاء الاصطناعي وراجعه فريق التحرير في لوجيسيتي. اعرف المزيد في سياسة التحرير.