أسطول روبوتات Nvidia يُدرِّب نفسه ذاتياً عبر وكلاء برمجة بالذكاء الاصطناعي

أبرز النقاط
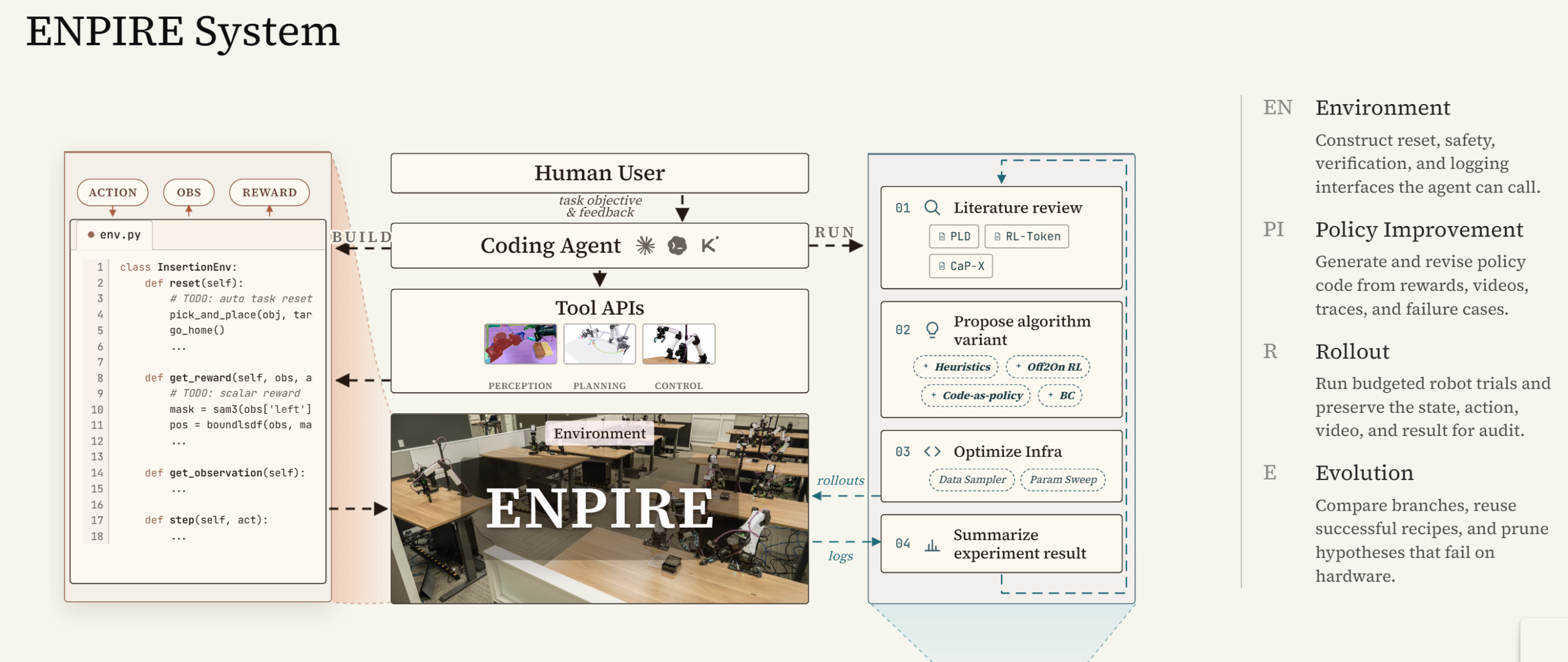
- نظام ENPIRE يحوّل مختبر الروبوتات إلى خط إنتاج برمجي ذاتي التحسين يعمل طوال الليل دون إشراف بشري
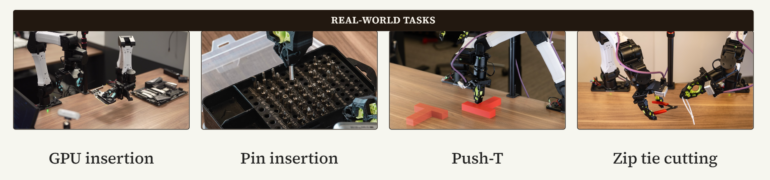
- أسطول من 8 روبوتات حقق نسبة نجاح 99% في مهام دقيقة كإدخال الدبابيس وقص الأربطة البلاستيكية
- الوكلاء البرمجيون يتشاركون الاكتشافات عبر Git، فينتشر أي اختراق في محطة واحدة إلى الأسطول بأكمله
نجحت Nvidia بالتعاون مع جامعتي Carnegie Mellon وUC Berkeley في تحويل مختبر روبوتات إلى منظومة ذاتية التحسين، حيث تُدرِّب روبوتات ذاتية التدريب نفسها على مهام معقدة دون الحاجة إلى إشراف بشري مستمر. أسطول من ثماني محطات روبوتية حقق نسبة نجاح تصل إلى 99% في مهام تتطلب براعة يدوية فائقة، مثل إدخال دبابيس دقيقة وقص أربطة بلاستيكية، وذلك بفضل نظام جديد يُدعى ENPIRE يعتمد على وكلاء برمجة بالذكاء الاصطناعي.
ما المشكلة التي يحلها نظام ENPIRE؟
تدريب الروبوتات على الإمساك الدقيق والتلاعب بالأشياء يظل من أصعب التحديات في مجال الروبوتات. السبب ليس تقنياً بحتاً، بل بشري: يحتاج المهندسون إلى جمع بيانات التدريب يدوياً، وإعادة ترتيب المشهد بعد كل محاولة، وتعديل الخوارزميات باستمرار. هذا العبء اليدوي يُبطئ البحث بشكل كبير ويجعل التوسع مكلفاً.
يكسر نظام ENPIRE هذا الاختناق بتسليم العمل بالكامل لوكلاء ذكاء اصطناعي برمجيين. الفكرة الجوهرية هي حلقة تغذية راجعة تعمل على عتاد حقيقي: إعادة ضبط مساحة العمل، تنفيذ استراتيجية، فحص النتيجة، ثم تحسين المحاولة التالية — كل ذلك آلياً.
كيف يبني الوكيل أدوات تقييمه بنفسه؟
يعمل ENPIRE على مرحلتين. في الأولى، يُنشئ الوكيل بيئة عمل متكاملة مع قدر ضئيل من التوجيه البشري: حدود أمان، آلية إعادة ضبط تلقائية، وفحص نجاح آلي. بدلاً من أن يُقيّم إنسان كل محاولة، يكتب الوكيل دالة مكافأة خاصة به للتمييز بين النجاح والفشل، مستنداً فقط إلى دقائق معدودة من مقاطع فيديو توضيحية.
لمهمة إدخال دبوس، مثلاً، طوّر الوكيل آلية فحص تجمع بين المحاذاة البصرية وارتفاع القابض والقوة المُقدَّرة. أما لإغلاق ربطة بلاستيكية، فقد دمج زاويتي كاميرا لتفادي الإيجابيات الكاذبة، وخفّض زمن الاستجابة إلى أقل من 150 ميلي ثانية. هذه الأدوات تُبنى مرة واحدة ثم تُعاد استخدامها دون تعديل.
ماذا يحدث في المرحلة الثانية؟
في المرحلة الثانية، يعمل الوكيل باستقلالية تامة. يقرأ أوراقاً بحثية، يُشكّل فرضيات، ويُعدّل كود التدريب مباشرة. يستخدم أساليب مثل الاستنساخ السلوكي — حيث تُقلّد الاستراتيجية العروض البشرية — أو التعلم المعزز الذي يتحسن بالتجربة والخطأ. يختار الوكيل الأسلوب بنفسه بناءً على إشارات النجاح الفعلية من العالم الحقيقي.
كيف يتنسق أسطول الروبوتات عبر Git؟
يتوسع ENPIRE ليشمل أسطولاً كاملاً: ثماني محطات روبوت YAM ثنائية الذراع، لكل منها عتادها وحاسوبها ووكيلها البرمجي الخاص. تختبر الوكلاء فرضيات مختلفة بالتوازي وتتشارك النتائج فقط عبر Git، أداة التحكم في الإصدارات المعيارية للبرمجيات.
تتبنى الوكلاء وصفات التدريب الناجحة من بعضها البعض وتتخلى عن الأفكار الفاشلة تلقائياً. أي اختراق يُكتشف في محطة واحدة ينتشر عبر الأسطول بأكمله. هذا النموذج يُحوّل المختبر الفيزيائي إلى خط إنتاج برمجي تقليدي.
ما النتائج التي حققها النظام؟
حققت الوكلاء نسبة نجاح تصل إلى 99% في مهام صعبة مثل اختبار Push-T — حيث يجب على الروبوت تحريك قطعة بشكل حرف T إلى موضع واتجاه محددين — وفرز الدبابيس في صندوق، وقص ربطة بلاستيكية بقاطع. لمهمة إدخال الدبوس، وصلت الاستراتيجية إلى نجاح 100% أسرع من الطرق التقليدية التي تتطلب تدخلاً بشرياً مستمراً.
- اختبار Push-T: انخفض الوقت اللازم للنجاح الكامل من 5 ساعات مع روبوت واحد إلى ساعتين فقط مع 8 روبوتات
- إدخال الدبوس: انخفض من أكثر من 90 دقيقة إلى نحو 40 دقيقة
- تجربة نقل المهارات: ساعدت خبرة إدخال الدبابيس الوكلاء على تركيب وحدات GPU في لوحات أم
اختبر الباحثون ثلاثة وكلاء برمجة: Codex مع GPT-5.5، وClaude Code مع Opus 4.7، وKimi Code مع Kimi K2.6. تفوّق Codex في معظم الحالات.
لماذا يظل العالم الحقيقي أصعب من المحاكاة؟
كشفت النتائج أن العالم الحقيقي يظل أصعب بكثير من المحاكاة. في اختبار Push-T، نجحت جميع الوكلاء الثلاثة في المحاكاة، لكن اثنين من ثلاثة فشلا في البيئة الحقيقية. يُرجع الباحثون ذلك إلى ظروف غير متوقعة ومتغيرة كديناميكيات الروبوت والاحتكاك وحركة الأشياء.
في محاكاة RoboCasa، تفوّق ENPIRE على نموذج رؤية-لغة-فعل شامل من نوع GR00T ونهج قائم على الأدوات دون بحث تلقائي من نوع CaP-X.
ما القيود المعترف بها؟
الدراسة صريحة بشأن حدودها. لا يُستغل العتاد والحوسبة بالكامل لأن الوكلاء يقضون وقتاً طويلاً في قراءة السجلات وكتابة الكود والانتظار. كلما زاد عدد الروبوتات في الأسطول، انخفض معدل استخدام كل روبوت لأن الوكلاء يقضون وقتاً أطول في تلخيص نتائج بعضهم البعض.
تكاليف الرموز اللغوية تنمو أيضاً أسرع من مكاسب الأداء: الأساطيل الأكبر تصل إلى الهدف أسرع لكنها تستهلك ميزانية حوسبة أكبر بكثير. ومع ذلك، يرى الباحثون أن ENPIRE يمثل مساراً عملياً نحو روبوتات قادرة على التحسن ذاتياً في العالم الحقيقي.
رأي Logicity
ما يجعل ENPIRE مهماً ليس نسبة النجاح وحدها، بل تحويل البحث الروبوتي من مشكلة عتادية إلى مشكلة هندسة برمجيات. هذا النموذج يُمكن أن يُسرّع بشكل جذري تطوير الروبوتات الصناعية في منطقة الخليج، خاصة مع توجه السعودية والإمارات نحو أتمتة المصانع ضمن رؤى التحول الاقتصادي. القدرة على تشغيل أبحاث روبوتية طوال الليل دون فريق بشري تُغيّر اقتصاديات المجال بالكامل.
الأسئلة الشائعة
ما هو نظام ENPIRE من Nvidia؟
ENPIRE هو إطار عمل بحثي يُمكّن وكلاء ذكاء اصطناعي برمجيين من إجراء أبحاث روبوتية ذاتياً على عتاد حقيقي، بما في ذلك إعادة ضبط المشهد وتصميم المكافآت وتعديل الخوارزميات دون تدخل بشري مستمر.
كيف تتشارك الروبوتات الاكتشافات في ENPIRE؟
تستخدم الوكلاء البرمجية أداة Git للتحكم في الإصدارات لمشاركة النتائج. أي استراتيجية ناجحة تُكتشف في محطة واحدة تنتشر تلقائياً عبر الأسطول بأكمله.
ما الفرق بين أداء ENPIRE في المحاكاة والواقع؟
أظهرت التجارب أن العالم الحقيقي أصعب بكثير من المحاكاة. في اختبار Push-T، نجحت جميع الوكلاء في المحاكاة لكن اثنين من ثلاثة فشلا في البيئة الحقيقية بسبب متغيرات كالاحتكاك وديناميكيات الروبوت.
ما التطبيقات المحتملة لهذه التقنية في الخليج؟
يمكن أن تُسرّع هذه التقنية أتمتة المصانع والمستودعات في دول الخليج، وتدعم مشاريع التحول الصناعي ضمن رؤية السعودية 2030 واستراتيجية الإمارات للثورة الصناعية الرابعة.
هل تحتاج مساعدة في التطبيق؟
إذا كنت تستكشف دمج الروبوتات الذكية أو أنظمة التدريب الذاتي في منشأتك، تواصل مع فريق Logicity للحصول على استشارة متخصصة حول أحدث حلول الأتمتة المناسبة لسوق الخليج.
عمر حسن
كاتب تقني وابتكار
مقالات ذات صلة
تصفح الكل
أمريكا تُجبر Anthropic على إيقاف نموذج Fable 5: حلفاء واشنطن يصفونه بـ«مفتاح القتل»
في سابقة تاريخية غير مسبوقة، أصدرت وزارة التجارة الأمريكية في 12 يونيو 2026 توجيهاً طارئاً أجبر شركة Anthropic على تعطيل نموذجيها الرائدين Fable 5 وMythos 5 على المستوى العالمي، مستندةً إلى مخاوف تتعل

GLM-5.2 يقترب من عرش النماذج المغلقة في سباق البرمجة الماراثونية
في خطوة تعيد رسم خريطة المنافسة بين النماذج المفتوحة والمغلقة، أطلق مختبر Zhipu AI الصيني نموذج GLM-5.2 الذي يحقق أداءً يكاد يلامس قمة النماذج التجارية المغلقة في مهام البرمجة الماراثونية. النموذج الج

أزمة Fable: من المسؤول عن إغلاق نماذج Anthropic — البيت الأبيض أم الشركة؟
في مساء الجمعة من منتصف يونيو 2026، اتخذ البيت الأبيض قراراً غير مسبوق أربك صناعة الذكاء الاصطناعي بأكملها: فرض قيود تصدير طارئة على نموذجَي Fable 5 وMythos 5 من شركة Anthropic، ما أجبر الشركة على إيق

إنفاق عمالقة التقنية على الذكاء الاصطناعي قد يتجاوز تدفقاتهم النقدية بحلول الربع الثالث من 2026
يواجه عمالقة التقنية الخمسة — Microsoft وAmazon وAlphabet وMeta وOracle — لحظة فارقة في تاريخهم المالي: إنفاقهم المتسارع على البنية التحتية للذكاء الاصطناعي بات يهدد بتجاوز قدرتهم على تمويله ذاتياً. و
اقرأ أيضاً
مستودع AUR يعلّق التسجيلات بعد اكتشاف 1,500 حزمة برمجية ملوثة ببرمجيات خبيثة
في خطوة دفاعية غير مسبوقة، علّق مستودع AUR — أكبر مستودع برمجيات مجتمعي لتوزيعة Arch Linux — تسجيل المطورين الجدد بعد اكتشاف أكثر من 1,500 حزمة برمجية ملوثة ببرمجيات خبيثة متطورة. الهجوم، الذي أُطلق ع

أودي S3 مستعملة أم تويوتا GR كورولا جديدة؟ لماذا قد تكون السيارة الألمانية الخيار الأذكى
ارتفاع أسعار السيارات الرياضية الجديدة يدفع كثيراً من عشاق القيادة نحو سوق المستعمل بحثاً عن قيمة حقيقية. والمفارقة أن أودي S3 مستعملة من موديل 2023 باتت متاحة اليوم بسعر مساوٍ أو أقل من تويوتا GR كور
Midjourney تدخل عالم الطب بماسح جسم كامل بالموجات فوق الصوتية وتخطط لافتتاح منتجع صحي في سان فرانسيسكو
في خطوة مفاجئة تماماً، انتقلت شركة Midjourney الشهيرة بتوليد الصور بالذكاء الاصطناعي إلى ميدان الرعاية الصحية، معلنةً عن أول منتج عتادي لها: ماسح جسم كامل بالموجات فوق الصوتية يَعِد بتقديم جودة تصوير